lsst.ts.mtdomecom#
TCP/IP interface to the controller for the Simonyi Survey Telescope dome at Vera C. Rubin Observatory.
Using lsst.ts.mtdomecom#
Build and Test#
This package has the following requirements:
ts_tcpip
ts_utils
The package is compatible with LSST DM’s scons build system and eups package management system.
Assuming you have the basic LSST DM stack installed you can do the following, from within the package directory:
setup -r .to setup the package and dependencies.sconsto build the package and run unit tests.scons install declareto install the package and declare it to eups.package-docs buildto build the documentation. This requiresdocumenteer; see building single package docs for installation instructions.
Usage#
The primary classes are:
MTDomeCom: TCP/IP interface to the controller for the Simonyi Survey Telescope dome.MockDomeController: Simulator for the dome TCP/IP interface.
Contributing#
lsst.ts.mtdomecom is developed at lsst-ts/ts_mtdomecom.
You can find Jira issues for this module using labels=ts_mtdomcoecom.
Python API reference#
lsst.ts.mtdomecom Package#
Functions#
|
Load a set of all enabled louvers from the "louvers_enabled.yaml" configuration file. |
Classes#
|
Command names. |
|
Class representing the TAI time at which a command was issued. |
|
Internal Motion states. |
|
LLC names. |
|
TCP/IP interface to the MTDome controller. |
|
Mock MTDome Controller that talks over TCP/IP. |
|
Response codes. |
|
Class representing a scheduled command. |
|
|
|
Class representing a command to stop an ongoing motion. |
|
Valid values for the simulation_mode attribute of the CSC. |
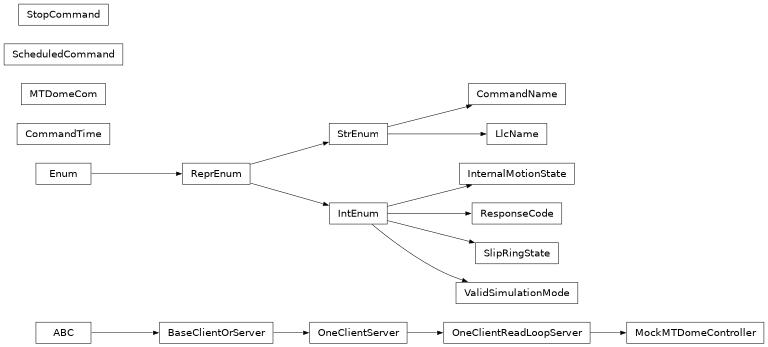
Class Inheritance Diagram#